Robots die vliegen, varen, rijden, of koffie schenken. Op een demonstratiedag van de minor robotica toonden studenten het resultaat van een half jaar werk.

Familie en vrienden kwamen naar de robots kijken. (Foto: Nina van Wijk)
“Het was heerlijk om eindelijk iets échts te doen”, vat IO-student Mart Drummen het gevoel van veel studenten samen, “in plaats van alleen maar rekenen en tekenen.” Studenten werktuigbouw, informatica, elektrotechniek en industrieel ontwerpen werkten vanaf september in teams aan robots op aanvraag van opdrachtgevers. Op woensdagmiddag 30 januari konden vrienden en familie komen kijken, en daar werd volop gebruik van gemaakt.
Martin Klomp, coördinator van de minor robotica, vindt dat het niveau dit jaar weer hoger ligt. Hij schrijft dat toe aan betere afspraken met de opdrachtgevers. In het overleg met hen heeft hij benadrukt dat er aan het eind van de minor een werkend prototype zou moeten staan. De meeste teams hebben dat inderdaad gehaald.
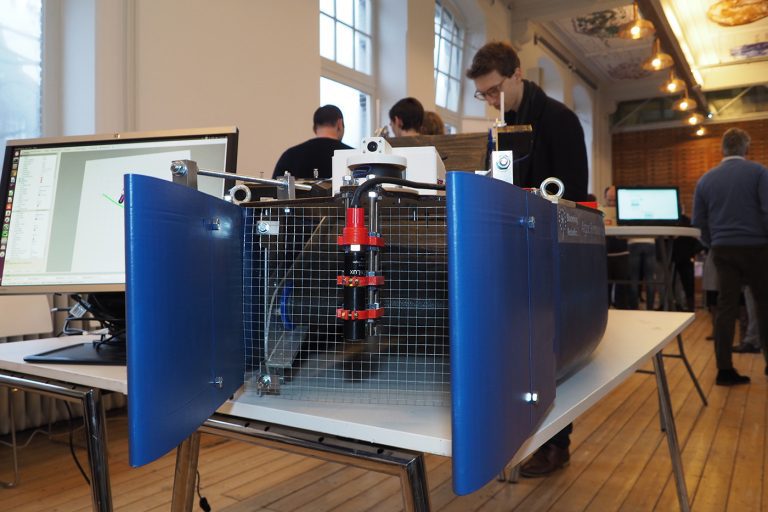
 Schaalmodel van Lobster. (Foto: Nina van Wijk)
Schaalmodel van Lobster. (Foto: Nina van Wijk)Diepzeebot
Team Lobster maakte voor Allseas een onderwaterrobot die ongevoelig is voor druk en daardoor tot grote diepten moet kunnen filmen. Omdat communicatie onder water lastig is moet de torpedovormige robot autonoom kunnen werken. Naast een kleiner model, dat in een zwembad getest is, werkt het team nu aan een full-scale versie. Die gaat later dit jaar te water in de Rotterdamse haven en de Noordzee, vertelt teamlid Jelle Vos.
 Automatische algenvisser. (Foto: Nina van Wijk)
Automatische algenvisser. (Foto: Nina van Wijk)Algenbot
Team Blooming Robotics bouwde in opdracht van Deltares een boot die drijvende algen verwijdert uit een aangegeven gebied. De ARV (Algae Removing Vessel) vaart baantjes heen en weer dwars op de wind. Zodra de detector op de boeg drijvend groen ontwaart, begint de transportband te lopen waardoor de opgeviste algen in de aanhanger verdwijnen. Een test in recreatiegebied de Delftse Hout verliep voorspoedig, vertelde Tim Yarally, behalve dat er niks te vangen was.
 Gemaakt voor de zeebodem. (Foto: Nina van Wijk)
Gemaakt voor de zeebodem. (Foto: Nina van Wijk)Baggerbot
De Amphi is de voorloper van het nieuwe baggeren: duurzaam, autonoom en makkelijk schaalbaar. Voor Boskalis ontwierp team Indepth Dredging een onderwaterrobot die met zich met rollers over de bodem beweegt. Het uiteindelijke model moet 2 à 3 keer groter worden met een capaciteit van 250 liter per uur. Als de bak vol zit, rijdt de robot naar een depot om te legen. Bij lege accu’s keert hij terug naar een oplaadpunt. En als Amphi de weg kwijt is? “Dan moet-ie maar een ‘ping’ geven”, suggereert Mees Vanderbroeck.
 De Coffee Corner robot schudt nog een beetje. (Foto: Nina van Wijk)
De Coffee Corner robot schudt nog een beetje. (Foto: Nina van Wijk)Barbot
Het is een lang gekoesterde wens van het Science Centre: een robot bij de entree die bezoekers koffie, thee of fris serveert. Maar ook dit jaar gaat dat niet lukken. Team DORST Robotics koos voor een open opzet met een koffieautomaat, kopjesdispenser, koelkast en zo meer, opgesteld rondom een robotarm. Een tablet verzorgt de aansturing. Trillend beweegt de arm zich naar de stapel kopjes, en schokkend plaatst de robot het kopje net naast de koffietap. Als hilarische act is de opstelling geslaagd, maar een horecadiploma haalt de Coffee Corner Robot nog niet.
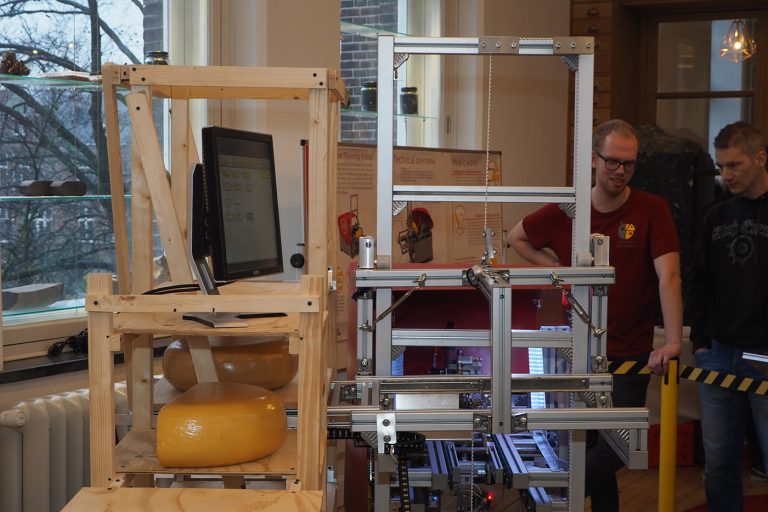 De kaasrobot heeft geen moeite meer met zware kazen. (Foto: Nina van Wijk)
De kaasrobot heeft geen moeite meer met zware kazen. (Foto: Nina van Wijk)Kaasbot
Opdrachtgever Lely kwam op herhaling voor een kaasrijprobot die een 16 kilo zware kaas uit een rek moet kunnen halen, omdraaien, bespuiten met een schimmelwerende coating en weer terugleggen. Vorig jaar was de ontwikkelde robot niet potig genoeg. Nu lukte team Easy Cheesy dat wel. Ze concentreerden zich op de hoofdtaak en mochten het rijden langs de stelling buiten beschouwing laten. Mogelijk komt dat er volgend jaar bij, zegt teamlid Mels Smit (technische informatica).
 Een van de indoor drones. (Foto: Nina van Wijk)
Een van de indoor drones. (Foto: Nina van Wijk)Zwermbot
Stel je voor: je doet een kist open, en er komen vijf drones tevoorschijn. Ze doen een dansje en verdwijnen dan geheel zelfstandig weer in de kist. Team bHIVE werkte hier aan in opdracht van het TU Delft MAVlab. De achterliggende bedoeling, vertelt Christophe de Wagter, is indoor navigatie waar gps ontbreekt. Een set van ultra wide band (UWB) radiobakens vormt een intern gps-netwerk dat de drones houvast biedt. In de toekomst zullen op basis van die techniek drones door winkels en magazijnen zoeven, verwacht hij. Teamlid Willem van der Vliet vertelt dat het team nog op onderdelen wacht voor de rest, maar één drone van de zwerm functioneert al.
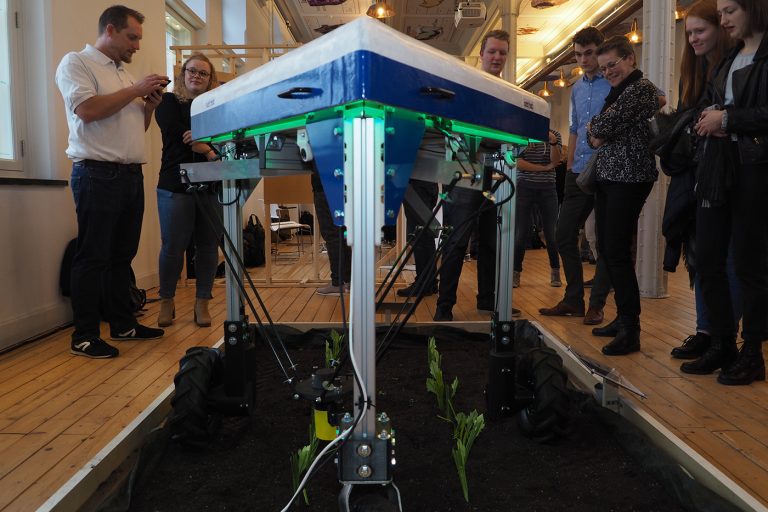 De grote tuinrobot wiedt onkruid. (Foto: Nina van Wijk)
De grote tuinrobot wiedt onkruid. (Foto: Nina van Wijk)Akkerbot
Voor de startup Odd.Bot maakte team Bolts ’n Bears een robot die onkruid kan wieden. De Weed Whacker rijdt op drie wielen tussen de voren en maakt korte metten met ongewenst groen. Hoe maakt de robot onderscheid tussen gewas en onkruid? Simpelweg omdat onkruid niet keurig in de rij staat. Daar is geen botanie voor nodig. De hoop is te besparen op zware machines en herbiciden in de landbouw, vertelt teamlid Mart Drummen. Over een maand rijdt de driehoekige robot (slechts 160 kilo) voor het eerst over een veld.
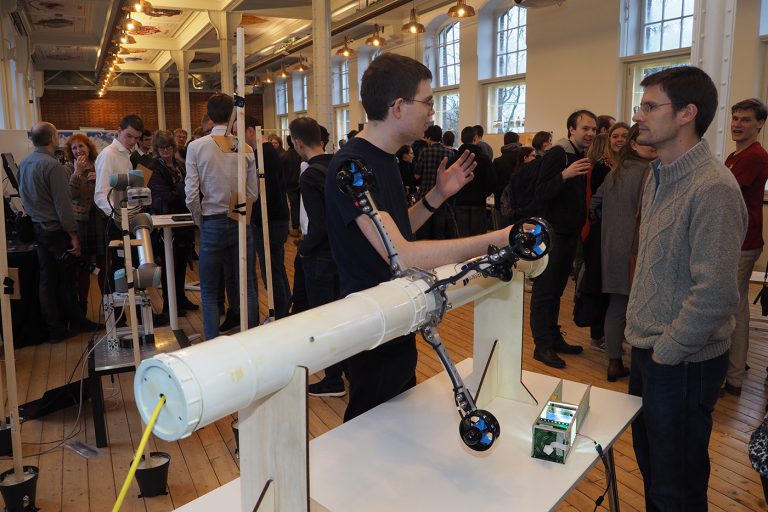
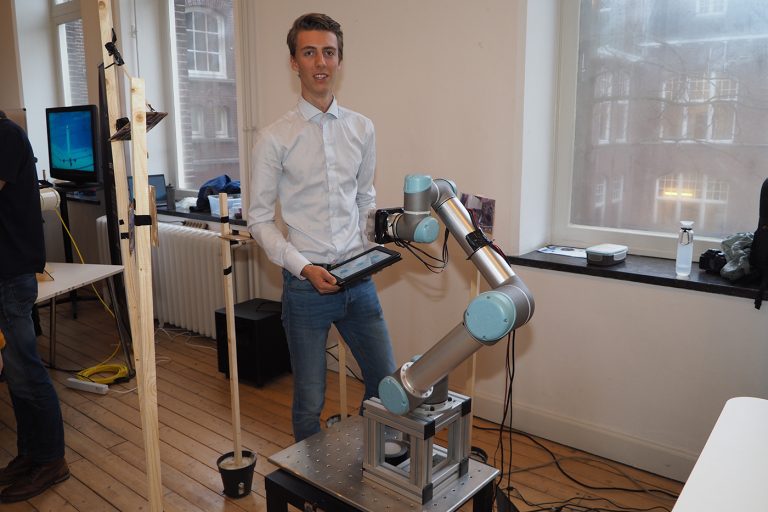 Tim Geukers bedient de inspectiebot. (Foto: Nina van Wijk)
Tim Geukers bedient de inspectiebot. (Foto: Nina van Wijk)Inspectiebot
Team nFocus bouwde voor KLM Engine Services een prototype van een robot die motoronderhoud deels moet automatiseren. De inspectie van een vliegtuigmotor is een tijdrovend proces (8 uur voor 103 onderdelen) waarbij een robot kan helpen. Een database vertelt de robot welke onderdelen waar moeten zitten. De robot stuurt dan een camera langs al die punten en maakt een opname. Het resultaat is een checklist van onderdelen die al dan niet zijn aangetroffen met foto’s. Onderhoudsmonteurs kunnen hiermee aan de slag. Het uiteindelijke model zal uit vier grotere robots moeten bestaan om een hele motor aan te kunnen, vertelt student Tim Geukers.
- Volgend jaar zal de minor in het Engels gegeven worden. Dat moet de drempel verlagen voor internationals bij dit tot nu toe uitsluitend Nederlandse evenement.
- Lees het verslag van de robotic minor 2017/2018
Heb je een vraag of opmerking over dit artikel?
j.w.wassink@tudelft.nl
Comments are closed.