In de VS en China kijken mensen niet meer op van auto’s zonder chauffeur. Europa loopt daarop achter, stelt hoogleraar intelligente voertuigen Dariu Gavrila. Intussen draait het Delftse Robotics Lab wel volop mee in onderzoek naar autonoom vervoer.

Mario Garzon geeft een introductie bij TU Delfts testauto voor autonoom rijden. (Foto: Thijs van Reeuwijk)
Dariu Gavrila is de professor die ervoor heeft gezorgd dat een Mercedes geen personen kan aanrijden. Toen hij bij Daimler werkte, ontwikkelde hij een intelligente noodrem die ingrijpt zodra een voetganger opduikt voor de bumper. Noodstop.
Dat was tien jaar geleden. Sinds 2016 leidt Gavrila bij de faculteit Mechanical Engineering de Intelligent Vehicles Group die onderzoek doet naar allerlei aspecten van autonome mobiliteit. Van waarneming tot aansturing en van acceptatie tot wagenziekte.

Gavrila verzorgde maandag 13 januari de ontvangst bij de rondleiding door het Robotics Lab in het kader van het diesthema 2025: Making Sense of Mobility. Hij vertelde dat de zelfrijdende auto in Europa een onderzoeksthema is maar dat ze in de VS en China gewoon op straat rijden. Europa loopt daarop achter, constateert Gavrila.
Het onderzoek naar autonome mobiliteit is in de eerste plaats belangrijk omdat het de verkeersveiligheid kan bevorderen, stelt hij. Volgens hem zou het aantal ongelukken met 90 procent kunnen afnemen, want in negen van de tien ongelukken is menselijk falen de oorzaak.
Daarnaast bieden zelfrijdende voertuigen mobiliteit voor mensen zonder rijbewijs voor wie het openbaar vervoer geen optie is. Ook kan een intelligent voertuig saai rijgedrag zoals filerijden overnemen. En tot slot zouden zelfrijdende voertuigen transport goedkoper kunnen maken doordat er geen chauffeur aan boord is, denkt Gavrila.
Maar voor het zover is, moeten er heel wat kwesties rondom autonome mobiliteit opgelost worden, zowel technisch als maatschappelijk.
Met name Tesla’s raken vaak in verwarring in een tunnel en kunnen dan plotseling remmen
Een voorbeeld van zo’n technisch probleem zijn radarreflecties bij de ingang van een tunnel. Met name Tesla’s raken daardoor vaak in verwarring en kunnen dan plotseling remmen. Camera’s kunnen slecht overweg met tegenlicht. Ook zijn historische Europese steden een stuk gecompliceerder voor autonome voertuigen dan de brede straten in de Verenigde Staten of China. Dat vereist enorme hoeveelheden trainingsdata, die er tot nu toe nog nauwelijks zijn.
En als de techniek er eenmaal is, beginnen de maatschappelijke vragen. Denk aan juridische kwesties (wie is aansprakelijk bij aanrijding of letsel?) Maar het is ook de vraag in hoeverre autorijders zullen kiezen voor autonoom rijden en wat ze ervoor willen betalen. En wat vindt de omgeving? In San Francisco kwamen bewoners in actie tegen de honderden zelfrijdende taxi’s in hun omgeving omdat ze niet wilden dat hun buurt als proeftuin werd gebruikt. Ze plaatsten een verkeerskegel op de motorkap en schakelden zo de Waymo’s uit.
Rondleiding

Naast al deze uitdagingen is er nog een kwestie. Hoe intelligent een voertuig ook zal worden, er komt altijd een moment dat de techniek faalt. Dan komt het onderzoek van dr. Georgios Papaioannou (faculteit Mechanical Engineering) van pas. Hij ontwikkelt een back-up voor wanneer sensors falen, de zelfrijdende auto op onbekend terrein terechtkomt, of het weer te extreem wordt. Bijvoorbeeld als natte sneeuw de radarsensors verblindt.

Dan moet een improviserend persoon uitkomst bieden, en bij voorkeur iemand op afstand. Daarvoor ontwikkelde Papaioannou samen met promovendi Varun Kotian en Chrysovalanto Messiou een console die gevoed wordt door de camera’s en sensors aan boord. De chauffeur op afstand neemt de besturing over om het voertuig uit de problemen te helpen. Dankzij het schuddende platform onder de chauffeursstoel, dat afstudeerder Emma Schippers ontwikkelde, is dat een heel realistische ervaring en voelt de chauffeur hoe het voertuig beweegt. Een goede G5-verbinding is wel een voorwaarde voor een levensechte ervaring.
Wagenziek

Als de auto zichzelf rijdt kan de gebruiker een boekje lezen of straffeloos zijn telefoon erbij pakken. Toch is dat niet altijd even plezierig want wagenziekte ligt op de loer. Dr. Barys Shyrokau (faculteit ME) heeft in zijn simulator een kronkelende weg nagebootst en daarmee al heel wat mensen misselijk gemaakt. “Maar nooit verder dan niveau zes”, vertelt hij. “Niveau tien is overgeven.”
Een oplossing heeft hij ook: als de auto voor het traject van dertig minuten tien minuten extra de tijd neemt, daalt het ongemak voor de inzittenden aanzienlijk. Rustig rijden reduceert wagenziekte. Ook handig om te weten voor in de vakantie.
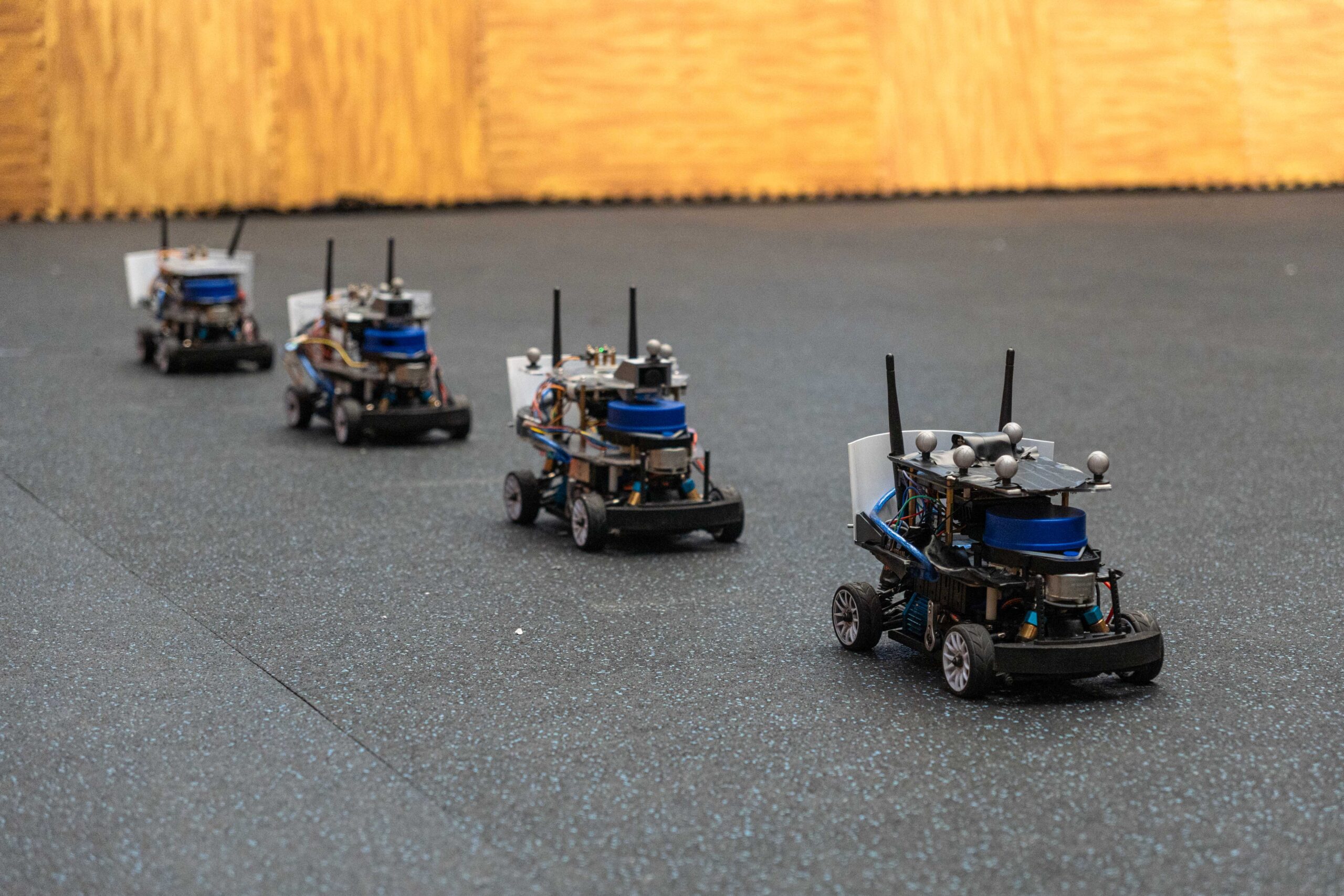
De rondleiding door het Robotics Lab eindigt bij een viertal robotkarretjes die strak achter elkaar aan rijden op een proefbaan ter grootte van een woonkamer. Ze rijden in colonne, zoals militaire voertuigen graag doen. Maar ook transporteurs hebben er belangstelling voor omdat het een oplossing zou kunnen bieden voor het tekort aan truckers.

Het voordeel van colonne rijden, leggen ME-onderzoekers Laura Ferranti en Lorenzo Lyons uit, is dat alleen de voorste wagen volledig autonoom hoeft te zijn. De rest heeft aan een adaptive cruise control en een stuurautomaat voldoende.
In China lopen ook tests met colonne rijden. Maar dan met vrachtwagens in plaats van robotkarretjes. Dat illustreert de door Gavrila geconstateerde achterstand, en de urgentie het onderzoek te intensiveren.
Heb je een vraag of opmerking over dit artikel?
j.w.wassink@tudelft.nl
Comments are closed.