A new traffic model called Fastlane is being tested on the A15 harbour motorway. Its forecasting ability should optimize control of serious congestions.

Congestions are an everyday sight on the A15, which links the Rotterdam harbour to the hinterland. Usually, they are a mixture between daily commuter jams and the consequences of arbitrary incidents and accidents on a particular day. Though we’ve learned to live with congestions, we’d like them to be handled in the most efficient way. And that’s where traffic models and traffic controllers come into view under the name of Dynamic Traffic Management or DTM.
Last week, the work of three PhD students from the TRAIL research school at the faculty of Civil Engineering and Geosciences culminated in a new traffic model called Fastlane that is currently undergoing tests with data from the Rotterdam harbour motorway.
Dr. Femke van Wageningen-Kessels, who graduated in applied mathematics at the TU, shows that numerous traffic flow models have been developed ever since their introduction in the 1930’s – presumably shortly after the first congestions occurred.
In traffic flow models, it’s all about speed (km/h) and traffic density (vehicles per kilometre). Fastlane also features passenger car equivalents (pce’s) which is a measure for how much a vehicle (truck or car) contributes to the traffic flow. A large truck has therefore a high pce value.
Traffic flow can be described with a fixed frame of reference or with one moving with the flow (Lagrangian). Dr. Yufei Yuan, who graduated in engineering mechanics in Shanghai, compared the two approaches in his PhD research and he found that “Langrangian traffic state estimation outperforms the Eulerian approaches in the EFK-based framework”. In other words, a moving reference frame works better. ‘EFK’ stands for the numerical technique (Extended Kalman Filter) that continually generates new forecasts based on the latest input.
However, problems with the moving frame arise when information travels faster than the vehicles themselves. However, in the case of congestions, one can easily assume that drivers only react on their leaders, not on their followers. “As a consequence,” says Van Wageningen-Kessels, “in the moving coordinate system information only travels in one direction: from one driver to its follower. We exploit this property to do fast and accurate simulations.”
A special feature of Fastlane is that it differentiates between classes of vehicles such as cars and trucks. Dr. Thomas Schreiter, who studied computer sciences in Karlsruhe, argues that the length taken up by a vehicle not only depends on the vehicle size, but also on its speed. The distance between driving trucks is only slightly bigger than between cars, whereas the length taken up by a truck standing still is three times than that of a car. A model should reckon with that, Schreiter argues.
In his PhD research he has proven that differentiating between cars and trucks (multi-class DTM) improves the performance of the simulation.
In his PhD research Schreiter has proven that differentiating between cars and trucks (multi-class DTM) improves the performance of the simulation.
 Europoort
EuropoortEuropoort
Europoort
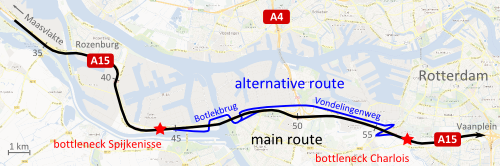
Fastlane is currently in the test phase under the project name BOS-HbR, which stands for “decision support system for the port of Rotterdam.” The joint project of TU, Port of Rotterdam and De Verkeersonderneming monitors the A15 motorway between Maasvlakte and the Vaanplein junction as well as an alternative route.
In this highway lab, road sensors supply data on traffic speed and flow. These are then translated into a real-time estimate of the current traffic flow and a prediction for the next hour. Being proactive, the system also generates a prediction for an altered or controlled traffic situation. Traffic controllers can open and close traffic lanes, regulate maximum speeds or divert trucks and/or cars over the alternative route. But which action is best?
“Fastlane optimizes the route guidance signals (in order) to minimize the vehicle loss hour and the corresponding future traffic state of the A15”, says the BOS-HbR website. Here traffic flow estimates, predictions and expected changes due to control are displayed on a daily basis, meanwhile building up a large dataset of traffic behavior. Only observations over time will tell how effective the traffic control diminishes time lost on the road.
“Pro-active modeling allows us to forecast the emergence of congestion”, Schreiter explains. “And so, measures can be taken to alleviate or delay the traffic jam. You could think of regulating the entries, rerouting traffic or reserving a lane for trucks.”
Schreiter will bring the theory into practice as a postdoc at Berkeley, California, where the highway authority Caltrans has ordered a demo in proactive traffic control.
–>Thomas Schreiter, Vehicles-class Specific Control of Freeway Traffic, 18 March 2013, PhD supervisors Prof. Serge Hoogendoorn and Dr Hans van Lint (CEG).
–> Yufei Yuan, Lagrangian Multi-Class Traffic State Estimation, 19 March 2013, PhD supervisor Prof. Serge Hoogendoorn and Dr Hans van Lint (CEG).
–> Femke van Wageningen-Kessels, Multi-class continuum traffic flow models – analysis and simulation models, 20 March 2013, PhD supervisors Prof. Serge Hoogendoorn (CEG) and Prof. Kees Vuik (EEMCS).
Do you have a question or comment about this article?
delta@tudelft.nl
Comments are closed.